▌Part I: The Actuator as the Robot's Nervous System
Every robotic motion—from micron-level surgical manipulation to high-speed logistics sorting—originates at the joint actuator. Yet actuator selection is often treated as a procurement task rather than a system-level engineering problem.
In reality, a robot joint motor actuator must simultaneously manage torque ripple, thermal behavior, encoder latency, gear mesh harmonics, and closed-loop stability. Any weakness in one parameter propagates through the entire kinematic chain, degrading precision and repeatability.
The Robot Joint Motor Actuator ND-A5216-10 developed by iHF Group addresses this by integrating motor, planetary gearbox, and dual-encoder feedback into a unified co-designed system rather than discrete components. This eliminates interface losses and improves dynamic consistency across all operating regimes.

▌Part II: Engineering Breakdown of the ND-A5216-10
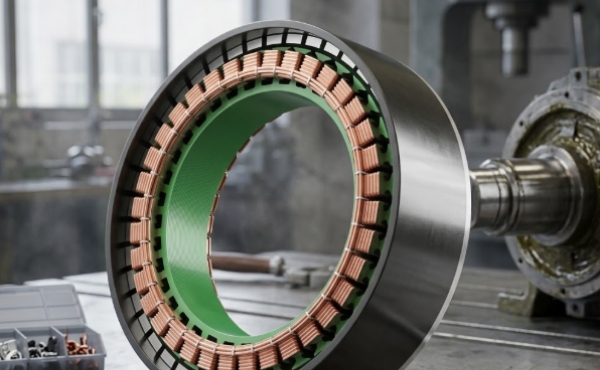
2.1 Electromagnetic Design: Cogging Torque Suppression
A key challenge in precision motion is cogging torque, caused by rotor-stator interaction. It produces low-speed velocity ripple, positional hunting, and acoustic noise.
The ND-A5216-10 mitigates this through optimized slot geometry and skewed magnet rotor design. Finite element optimization ensures smooth torque output even below 100 RPM, a critical range for precision assembly, force control, and delicate insertion tasks.
2.2 Planetary Gear Reduction: <3 Arcminute Backlash
The actuator integrates a high-precision helical planetary gearbox with backlash under 3 arcminutes (0.05°). On a 1-meter arm, this corresponds to <0.87 mm tip deviation from gear backlash alone.
Helical gears provide progressive engagement, offering:
● Higher torque density than spur gears
● Reduced vibration transmission
● Lower acoustic emissions for human-safe environments
Compared to spur systems, helical planetary reduction improves smoothness and load distribution, enhancing structural stability and dynamic response.
2.3 Dual-Encoder Architecture
Unlike single-encoder systems that infer output motion through gear ratios, the ND-A5216-10 uses dual encoders:
● Motor-side encoder for commutation and velocity control
● Output-side encoder for true shaft position
This eliminates cumulative errors from backlash, torsional compliance, and thermal expansion. It also enables real-time diagnostics by comparing motor and output position deviation, allowing early detection of mechanical wear.
2.4 Unified Closed-Loop Control
The actuator supports simultaneous torque, speed, and position regulation through cascaded control loops:
● Torque loop: 1–5 kHz bandwidth
● Velocity loop: 200–500 Hz
● Position loop: 50–200 Hz
Feedforward inverse dynamics compensate for inertia and nonlinear effects, reducing tracking error during fast acceleration. This allows seamless switching between high-speed motion and compliant force control without mode transitions.

▌Part III: Dynamic and Thermal Performance
3.1 Rapid Direction Reversal
Cycle time in robotics is often dominated by deceleration and reversal rather than peak speed. The ND-A5216-10 reduces reversal delay through:
● Low rotor inertia
● High current loop bandwidth
● Controlled mechanical compliance in gear train
This minimizes oscillation and improves throughput in pick-and-place, welding, and inspection systems.
3.2 Thermal Management
Thermal stability is critical in continuous-duty operation. Temperature rise increases resistance, reduces torque constant, and accelerates insulation aging.
The actuator addresses this via:
● High copper fill factor stator design
● Thermally conductive potting materials
● Ribbed aluminum housing for improved convection
These features reduce derating and maintain stable torque output in 24/7 operation.
▌Part IV: Application Domains
4.1 Precision Manufacturing
In micro-assembly and electronics production, accuracy requirements reach ±0.02–0.05 mm. The ND-A5216-10 enables this through low backlash, dual feedback, and smooth torque output. It is particularly effective in wrist joints of multi-axis robotic arms for fine orientation tasks.
4.2 Collaborative Robotics
Cobots must comply with ISO/TS 15066 force limits while maintaining productivity. The actuator’s low friction, fast torque response, and low noise design enable safe human interaction. Helical gearing reduces acoustic output, improving workplace usability.
4.3 Logistics Automation
In AGVs and sorting systems, adaptability is essential. Torque-mode control allows handling of varying payloads—from fragile items to heavy parcels—without hardware changes. Fast acceleration and deceleration directly improve throughput efficiency.
4.4 Inspection and Laboratory Systems
Metrology and semiconductor inspection require ultra-low vibration environments. The actuator’s rotor balancing and smooth gear engagement minimize vibration transmission, ensuring measurement stability in adjacent sensitive equipment.
▌Part V: iHF Group Engineering Philosophy
At iHF Group, actuator development follows a system-level co-design philosophy:
● Torque density optimization across electromagnetic, thermal, and mechanical domains
● Multi-physics simulation to eliminate cogging and saturation early
● System-level vibration control integrating actuator and structure
● Control-aware mechanical design for improved dynamic response
● IEC 60068-based durability validation for industrial reliability
The ND-A5216-10 is not a standalone component but part of a co-optimized motion system designed for intelligent manufacturing environments.
▌Part VI: Market Context
The robotics actuator market is expanding rapidly due to:
● Industry 4.0 automation and flexible production systems
● Growth of collaborative robotics in shared human environments
● Miniaturization of industrial machinery
● Demand for higher torque density in compact spaces
In this context, integrated actuators like the ND-A5216-10 reduce system complexity by combining motor, gearbox, and sensing into one architecture, accelerating OEM development cycles and improving reliability.
❓ FAQ
Q1: How is ND-A5216-10 different from motor + gearbox systems?
It integrates motor, planetary gearbox, and dual encoders into a co-designed system, eliminating alignment errors and improving closed-loop accuracy.
Q2: What is its backlash performance?
Below 3 arcminutes, corresponding to sub-millimeter positioning error on long robotic arms.
Q3: Why dual encoders?
They eliminate inference errors by directly measuring output position, improving trajectory accuracy and enabling predictive maintenance.
Q4: Is torque control supported?
Yes. The actuator supports real-time torque, speed, and position control with high-bandwidth response suitable for force-sensitive applications.
Q5: Is it suitable for cobots?
Yes. Low noise, compliant torque control, and fast response make it suitable for human-robot collaboration environments.
Q6: What advantages does it offer in logistics systems?
Adaptive torque control enables handling of mixed payloads with varying mass and fragility without hardware changes.
Q7: What support does iHF Group provide?
CAD models, torque-speed data, thermal analysis, and application-level engineering support for OEM integration.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Request Quote
Request Quote