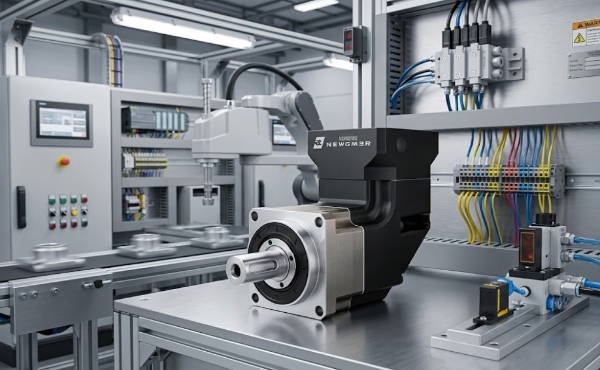
The global push toward advanced industrial automation, high-payload collaborative robots (cobots), surgical medical arms, and multi-axis defense systems places extreme demands on electromechanical actuators. Traditional packaged servo motors often add too much bulk, excess weight, and mechanical compliance to joint designs. To achieve fluid, high-torque motion within constrained spaces, modern design engineers are turning to integrated frameless torque joint motors.
By embedding the stator and rotor directly into the machine's structural housing, these integrated kits eliminate unnecessary shafts, bearings, and couplings. However, achieving true precision in compact joints requires far more than just basic integration; it demands advanced magnetic tuning, precise feedback mechanics, and streamlined system connectivity.
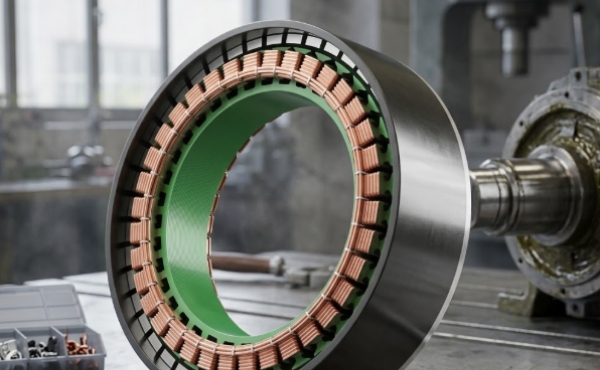
💡 Advanced Magnetic Design: Maximizing Torque Density while Mitigating Cogging
In precision motion control, a motor's performance is often limited by its thermal boundaries and inherent magnetic friction. Standard frameless motors frequently suffer from severe cogging torque—periodic magnetic pulling between the rotor magnets and stator slots—which degrades positioning precision at slow speeds.
To address these limitations, state-of-the-art robotic joints implement an optimized motor slot design. By calculating the precise geometric skew of the stator slots or shifting the permanent magnet layout on the rotor, engineers can significantly reduce cogging effects. This design yields a remarkably high torque density, ensuring maximum torque output per unit volume while maintaining smooth rotation.
● Low-Speed Control Excellence: Thanks to this optimized magnetic architecture, the system maintains precise control at low speeds. It eliminates the stick-slip issues common in lower-end direct-drive configurations, which is crucial for high-precision welding, micro-assembly, and delicate surgical applications.
● Low Vibration and Silent Operation: This structural tuning ensures a fast response, stable operation, low vibration, and low noise. Eliminating high-frequency acoustic resonance is particularly vital for medical operating rooms and collaborative cleanroom workspaces.
🛠️ Mechanical Kinematics: Integrating High-Precision Planetary Reducers
A frameless motor kit provides raw electromagnetic torque, but converting that power into usable robotic joint articulation requires a high-performance speed reduction system. Integrating a high-precision planetary gear reducer featuring advanced helical gear profiles provides a highly compact, robust solution.
Ultra-Low Backlash Calibration: Standard commercial gearboxes introduce significant backlash, which ruins position repeatability. Premium integrated joints feature a tooth root roundness of less than 3 arc minutes. This tight geometric tolerance guarantees outstanding torsional rigidity and minimizes lost motion during bidirectional cycles.
Rapid Directional Reversal: The low inertia of the frameless rotor, paired with the precise fit of the helical planetary gears, enables rapid motor direction reversal. The actuator can pivot instantaneously under high load without introducing mechanical shocks or straining the drivetrain.


🏢 Closed-Loop Intelligence: The iHF Group Actuation Standard
For industrial robot builders and automation systems integrators, assembling separate stators, rotors, strain-wave gears, and encoders from different vendors presents a frustrating manufacturing bottleneck. Incompatibilities between components often lead to signal lag, thermal expansion issues, and complex calibration procedures.
To solve these industry challenges, iHF Group has engineered a fully integrated, high-performance modular joint solution. By matching precision direct-drive technology with advanced feedback hardware, iHF Group systems deliver unmatched direct-drive performance right out of the box.
⚙️ True Multi-Variable Closed-Loop Control: iHF Group controllers achieve complete, deterministic closed-loop control of torque, speed, and position. Advanced field-oriented control (FOC) algorithms process current profiles in real time, preventing tracking errors even during highly dynamic movements.
📊 Dual Encoder Feedback Architecture: To eliminate the positioning errors caused by physical gear deflection under heavy loads, the system supports dual encoders to further enhance feedback control accuracy. A high-resolution incremental or absolute encoder monitors the high-speed motor shaft, while a secondary absolute encoder monitors the low-speed output joint directly. This setup continuously measures and corrects for minor micro-deflections in real time.


🔌 Streamlining System Topography: Daisy-Chain Architecture
As robotic systems add more axes—such as 7-axis cobots or complex humanoid structures—managing the internal wiring loom becomes highly complex. Running dedicated power and feedback cables from a central control cabinet through every single joint leads to thick cable bundles that restrict joint movement and increase failure risks from continuous twisting.
Modern high-density joints overcome this by incorporating a space-saving serial communications layout. The system supports daisy-chain configuration for multiple units, facilitating power supply and data transmission. By embedding a localized micro-drive inside each joint, a single shared DC power bus and a high-speed industrial Ethernet cable (such as EtherCAT or CANopen) can be routed sequentially from one joint to the next. This drastically reduces total cable weight, simplifies physical routing, and enhances overall system reliability.
❓ Technical Deep Dive: Industry Q&A
Q1: How does a dual-encoder setup protect against mechanical wear over time?
A: In a single-encoder system, if the planetary gears experience minor wear or backlash over years of service, the controller remains unaware of the physical error at the output flange. By utilizing the dual-encoder support provided by iHF Group, the secondary encoder monitors the actual tool position directly. Even if mechanical wear occurs inside the reducer, the closed-loop system automatically compensates for the variance, ensuring your robot maintains sub-millimeter precision throughout its operational life.
Q2: Why are helical gears preferred over spur gears in high-torque joint applications?
A: Helical gears feature angled tooth lines that engage gradually rather than all at once. This progressive tooth contact significantly increases the total contact ratio, spreading high mechanical loads across multiple teeth. This layout directly enables a tooth root roundness of less than 3 arc minutes, lowers acoustic noise, and provides the superior torsional strength required for sudden torque spikes.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Request Quote
Request Quote